![]()
![]()
Optimization of a State-to-State Transfer in a Two-Level-System¶
[1]:
# NBVAL_IGNORE_OUTPUT
%load_ext watermark
import qutip
import numpy as np
import scipy
import matplotlib
import matplotlib.pylab as plt
import krotov
%watermark -v --iversions
Python implementation: CPython
Python version : 3.8.16
IPython version : 8.12.3
qutip : 4.7.6
scipy : 1.10.1
matplotlib: 3.7.5
krotov : 1.3.0
numpy : 1.24.4
\(\newcommand{tr}[0]{\operatorname{tr}} \newcommand{diag}[0]{\operatorname{diag}} \newcommand{abs}[0]{\operatorname{abs}} \newcommand{pop}[0]{\operatorname{pop}} \newcommand{aux}[0]{\text{aux}} \newcommand{opt}[0]{\text{opt}} \newcommand{tgt}[0]{\text{tgt}} \newcommand{init}[0]{\text{init}} \newcommand{lab}[0]{\text{lab}} \newcommand{rwa}[0]{\text{rwa}} \newcommand{bra}[1]{\langle#1\vert} \newcommand{ket}[1]{\vert#1\rangle} \newcommand{Bra}[1]{\left\langle#1\right\vert} \newcommand{Ket}[1]{\left\vert#1\right\rangle} \newcommand{Braket}[2]{\left\langle #1\vphantom{#2}\mid{#2}\vphantom{#1}\right\rangle} \newcommand{op}[1]{\hat{#1}} \newcommand{Op}[1]{\hat{#1}} \newcommand{dd}[0]{\,\text{d}} \newcommand{Liouville}[0]{\mathcal{L}} \newcommand{DynMap}[0]{\mathcal{E}} \newcommand{identity}[0]{\mathbf{1}} \newcommand{Norm}[1]{\lVert#1\rVert} \newcommand{Abs}[1]{\left\vert#1\right\vert} \newcommand{avg}[1]{\langle#1\rangle} \newcommand{Avg}[1]{\left\langle#1\right\rangle} \newcommand{AbsSq}[1]{\left\vert#1\right\vert^2} \newcommand{Re}[0]{\operatorname{Re}} \newcommand{Im}[0]{\operatorname{Im}}\)
This first example illustrates the basic use of the krotov package by solving a simple canonical optimization problem: the transfer of population in a two level system.
Two-level-Hamiltonian¶
We consider the Hamiltonian \(\op{H}_{0} = - \frac{\omega}{2} \op{\sigma}_{z}\), representing a simple qubit with energy level splitting \(\omega\) in the basis \(\{\ket{0},\ket{1}\}\). The control field \(\epsilon(t)\) is assumed to couple via the Hamiltonian \(\op{H}_{1}(t) = \epsilon(t) \op{\sigma}_{x}\) to the qubit, i.e., the control field effectively drives transitions between both qubit states.
[2]:
def hamiltonian(omega=1.0, ampl0=0.2):
"""Two-level-system Hamiltonian
Args:
omega (float): energy separation of the qubit levels
ampl0 (float): constant amplitude of the driving field
"""
H0 = -0.5 * omega * qutip.operators.sigmaz()
H1 = qutip.operators.sigmax()
def guess_control(t, args):
return ampl0 * krotov.shapes.flattop(
t, t_start=0, t_stop=5, t_rise=0.3, func="blackman"
)
return [H0, [H1, guess_control]]
[3]:
H = hamiltonian()
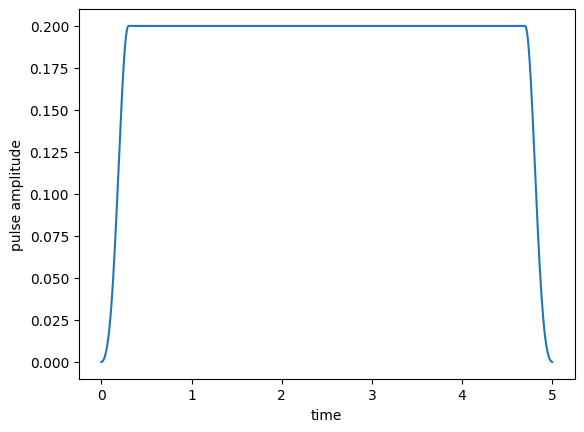
The control field here switches on from zero at \(t=0\) to it’s maximum amplitude 0.2 within the time period 0.3 (the switch-on shape is half a Blackman pulse). It switches off again in the time period 0.3 before the final time \(T=5\)). We use a time grid with 500 time steps between 0 and \(T\):
[4]:
tlist = np.linspace(0, 5, 500)
[5]:
def plot_pulse(pulse, tlist):
fig, ax = plt.subplots()
if callable(pulse):
pulse = np.array([pulse(t, args=None) for t in tlist])
ax.plot(tlist, pulse)
ax.set_xlabel('time')
ax.set_ylabel('pulse amplitude')
plt.show(fig)
[6]:
plot_pulse(H[1][1], tlist)
Optimization target¶
The krotov package requires the goal of the optimization to be described by a list of Objective instances. In this example, there is only a single objective: the state-to-state transfer from initial state \(\ket{\Psi_{\init}} = \ket{0}\) to the target state \(\ket{\Psi_{\tgt}} = \ket{1}\), under the dynamics of the Hamiltonian \(\op{H}(t)\):
[7]:
objectives = [
krotov.Objective(
initial_state=qutip.ket("0"), target=qutip.ket("1"), H=H
)
]
objectives
[7]:
[Objective[|Ψ₀(2)⟩ to |Ψ₁(2)⟩ via [H₀[2,2], [H₁[2,2], u₁(t)]]]]
In addition, we would like to maintain the property of the control field to be zero at \(t=0\) and \(t=T\), with a smooth switch-on and switch-off. We can define an “update shape” \(S(t) \in [0, 1]\) for this purpose: Krotov’s method will update the field at each point in time proportionally to \(S(t)\); wherever \(S(t)\) is zero, the optimization will not change the value of the control from the original guess.
[8]:
def S(t):
"""Shape function for the field update"""
return krotov.shapes.flattop(
t, t_start=0, t_stop=5, t_rise=0.3, t_fall=0.3, func='blackman'
)
Beyond the shape, Krotov’s method uses a parameter \(\lambda_a\) for each control field that determines the overall magnitude of the respective field in each iteration (the smaller \(\lambda_a\), the larger the update; specifically, the update is proportional to \(\frac{S(t)}{\lambda_a}\)). Both the update-shape \(S(t)\) and the \(\lambda_a\) parameter must be passed to the optimization routine as “pulse options”:
[9]:
pulse_options = {
H[1][1]: dict(lambda_a=5, update_shape=S)
}
Simulate dynamics under the guess field¶
Before running the optimization procedure, we first simulate the dynamics under the guess field \(\epsilon_{0}(t)\). The following solves equation of motion for the defined objective, which contains the initial state \(\ket{\Psi_{\init}}\) and the Hamiltonian \(\op{H}(t)\) defining its evolution. This delegates to QuTiP’s usual mesolve function.
We use the projectors \(\op{P}_0 = \ket{0}\bra{0}\) and \(\op{P}_1 = \ket{1}\bra{1}\) for calculating the population:
[10]:
proj0 = qutip.ket2dm(qutip.ket("0"))
proj1 = qutip.ket2dm(qutip.ket("1"))
[11]:
guess_dynamics = objectives[0].mesolve(tlist, e_ops=[proj0, proj1])
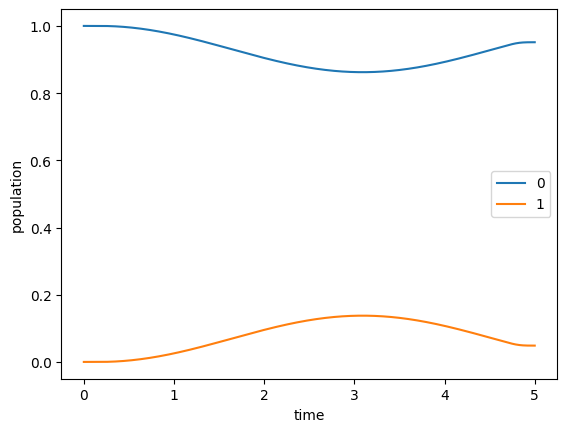
The plot of the population dynamics shows that the guess field does not transfer the initial state \(\ket{\Psi_{\init}} = \ket{0}\) to the desired target state \(\ket{\Psi_{\tgt}} = \ket{1}\) (so the optimization will have something to do).
[12]:
def plot_population(result):
fig, ax = plt.subplots()
ax.plot(result.times, result.expect[0], label='0')
ax.plot(result.times, result.expect[1], label='1')
ax.legend()
ax.set_xlabel('time')
ax.set_ylabel('population')
plt.show(fig)
[13]:
plot_population(guess_dynamics)
Optimize¶
In the following we optimize the guess field \(\epsilon_{0}(t)\) such that the intended state-to-state transfer \(\ket{\Psi_{\init}} \rightarrow \ket{\Psi_{\tgt}}\) is solved, via the krotov package’s central optimize_pulses routine. It requires, besides the previously defined objectives, information about the optimization functional \(J_T\) (implicitly, via chi_constructor, which calculates the states \(\ket{\chi} = \frac{J_T}{\bra{\Psi}}\)).
Here, we choose \(J_T = J_{T,\text{ss}} = 1 - F_{\text{ss}}\) with \(F_{\text{ss}} = \Abs{\Braket{\Psi_{\tgt}}{\Psi(T)}}^2\), with \(\ket{\Psi(T)}\) the forward propagated state of \(\ket{\Psi_{\init}}\). Even though \(J_T\) is not explicitly required for the optimization, it is nonetheless useful to be able to calculate and print it as a way to provide some feedback about the optimization progress. Here, we pass as an info_hook the function
krotov.info_hooks.print_table, using krotov.functionals.J_T_ss (which implements the above functional; the krotov library contains implementations of all the “standard” functionals used in quantum control). This info_hook prints a tabular overview after each iteration, containing the value of \(J_T\), the magnitude of the integrated pulse update, and information on how much \(J_T\) (and the full Krotov functional \(J\)) changes between iterations. It also stores the
value of \(J_T\) internally in the Result.info_vals attribute.
The value of \(J_T\) can also be used to check the convergence. In this example, we limit the number of total iterations to 10, but more generally, we could use the check_convergence parameter to stop the optimization when \(J_T\) falls below some threshold. Here, we only pass a function that checks that the value of \(J_T\) is monotonically decreasing. The krotov.convergence.check_monotonic_error relies on krotov.info_hooks.print_table internally having stored the value
of \(J_T\) to the Result.info_vals in each iteration.
[14]:
opt_result = krotov.optimize_pulses(
objectives,
pulse_options=pulse_options,
tlist=tlist,
propagator=krotov.propagators.expm,
chi_constructor=krotov.functionals.chis_ss,
info_hook=krotov.info_hooks.print_table(J_T=krotov.functionals.J_T_ss),
check_convergence=krotov.convergence.Or(
krotov.convergence.value_below('1e-3', name='J_T'),
krotov.convergence.check_monotonic_error,
),
store_all_pulses=True,
)
iter. J_T ∫gₐ(t)dt J ΔJ_T ΔJ secs
0 9.51e-01 0.00e+00 9.51e-01 n/a n/a 0
1 9.24e-01 1.20e-02 9.36e-01 -2.71e-02 -1.50e-02 1
2 8.83e-01 1.83e-02 9.02e-01 -4.11e-02 -2.28e-02 1
3 8.23e-01 2.71e-02 8.50e-01 -6.06e-02 -3.35e-02 1
4 7.37e-01 3.84e-02 7.76e-01 -8.52e-02 -4.68e-02 1
5 6.26e-01 5.07e-02 6.77e-01 -1.11e-01 -6.05e-02 1
6 4.96e-01 6.04e-02 5.56e-01 -1.31e-01 -7.02e-02 1
7 3.62e-01 6.30e-02 4.25e-01 -1.34e-01 -7.09e-02 1
8 2.44e-01 5.65e-02 3.00e-01 -1.18e-01 -6.15e-02 1
9 1.53e-01 4.39e-02 1.97e-01 -9.03e-02 -4.64e-02 1
10 9.20e-02 3.02e-02 1.22e-01 -6.14e-02 -3.12e-02 1
11 5.35e-02 1.90e-02 7.25e-02 -3.85e-02 -1.94e-02 1
12 3.06e-02 1.14e-02 4.20e-02 -2.29e-02 -1.15e-02 1
13 1.73e-02 6.60e-03 2.39e-02 -1.32e-02 -6.64e-03 1
14 9.78e-03 3.76e-03 1.35e-02 -7.54e-03 -3.78e-03 1
15 5.52e-03 2.13e-03 7.65e-03 -4.26e-03 -2.13e-03 1
16 3.11e-03 1.20e-03 4.31e-03 -2.40e-03 -1.20e-03 1
17 1.76e-03 6.77e-04 2.43e-03 -1.36e-03 -6.78e-04 1
18 9.91e-04 3.82e-04 1.37e-03 -7.64e-04 -3.82e-04 1
[15]:
opt_result
[15]:
Krotov Optimization Result
--------------------------
- Started at 2024-06-03 12:28:57
- Number of objectives: 1
- Number of iterations: 18
- Reason for termination: Reached convergence: J_T < 1e-3
- Ended at 2024-06-03 12:29:28 (0:00:31)
Simulate the dynamics under the optimized field¶
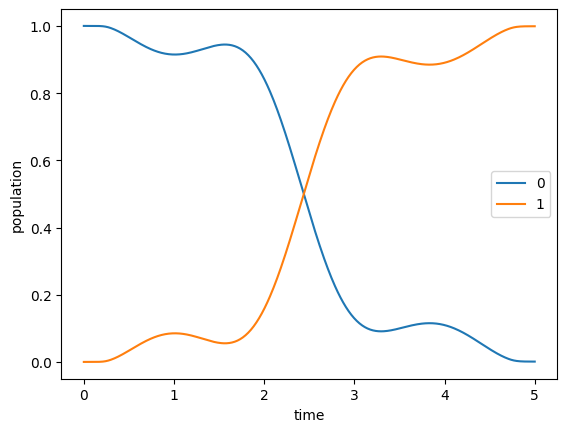
Having obtained the optimized control field, we can simulate the dynamics to verify that the optimized field indeed drives the initial state \(\ket{\Psi_{\init}} = \ket{0}\) to the desired target state \(\ket{\Psi_{\tgt}} = \ket{1}\).
[16]:
opt_dynamics = opt_result.optimized_objectives[0].mesolve(
tlist, e_ops=[proj0, proj1])
[17]:
plot_population(opt_dynamics)
To gain some intuition on how the controls and the dynamics change throughout the optimization procedure, we can generate a plot of the control fields and the dynamics after each iteration of the optimization algorithm. This is possible because we set store_all_pulses=True in the call to optimize_pulses, which allows to recover the optimized controls from each iteration from Result.all_pulses. The flag is not set to True by default, as for long-running optimizations with thousands or
tens of thousands iterations, the storage of all control fields may require significant memory.
[18]:
def plot_iterations(opt_result):
"""Plot the control fields in population dynamics over all iterations.
This depends on ``store_all_pulses=True`` in the call to
`optimize_pulses`.
"""
fig, [ax_ctr, ax_dyn] = plt.subplots(nrows=2, figsize=(8, 10))
n_iters = len(opt_result.iters)
for (iteration, pulses) in zip(opt_result.iters, opt_result.all_pulses):
controls = [
krotov.conversions.pulse_onto_tlist(pulse)
for pulse in pulses
]
objectives = opt_result.objectives_with_controls(controls)
dynamics = objectives[0].mesolve(
opt_result.tlist, e_ops=[proj0, proj1]
)
if iteration == 0:
ls = '--' # dashed
alpha = 1 # full opacity
ctr_label = 'guess'
pop_labels = ['0 (guess)', '1 (guess)']
elif iteration == opt_result.iters[-1]:
ls = '-' # solid
alpha = 1 # full opacity
ctr_label = 'optimized'
pop_labels = ['0 (optimized)', '1 (optimized)']
else:
ls = '-' # solid
alpha = 0.5 * float(iteration) / float(n_iters) # max 50%
ctr_label = None
pop_labels = [None, None]
ax_ctr.plot(
dynamics.times,
controls[0],
label=ctr_label,
color='black',
ls=ls,
alpha=alpha,
)
ax_dyn.plot(
dynamics.times,
dynamics.expect[0],
label=pop_labels[0],
color='#1f77b4', # default blue
ls=ls,
alpha=alpha,
)
ax_dyn.plot(
dynamics.times,
dynamics.expect[1],
label=pop_labels[1],
color='#ff7f0e', # default orange
ls=ls,
alpha=alpha,
)
ax_dyn.legend()
ax_dyn.set_xlabel('time')
ax_dyn.set_ylabel('population')
ax_ctr.legend()
ax_ctr.set_xlabel('time')
ax_ctr.set_ylabel('control amplitude')
plt.show(fig)
[19]:
plot_iterations(opt_result)
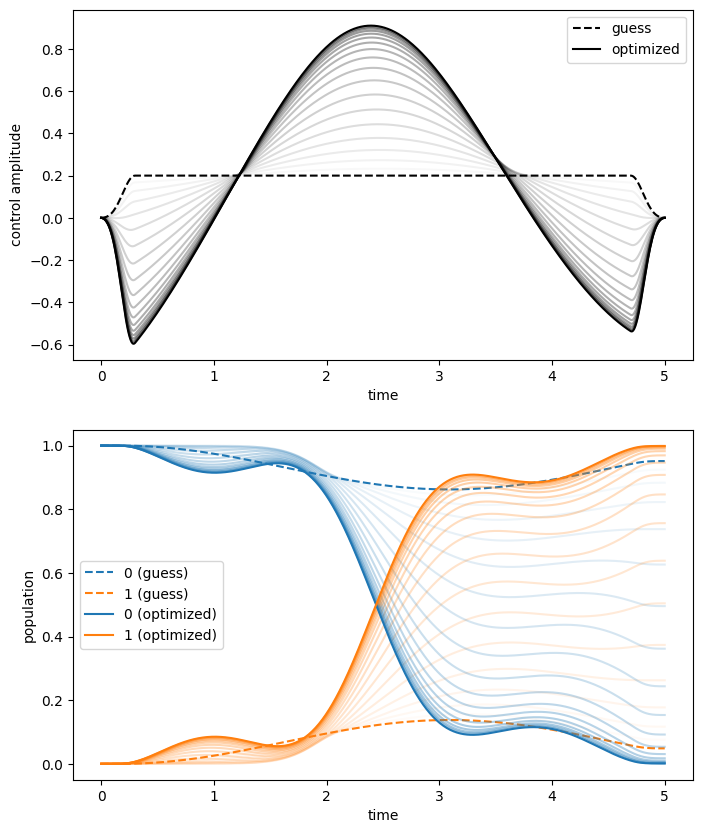
The initial guess (dashed) and final optimized (solid) control amplitude and resulting dynamics are shown with full opacity, whereas the curves corresponding intermediate iterations are shown with decreasing transparency.